꾸러미:
com.introlab.rtabmap
다운로드:
1K
크기:
32 MB
지원되는 android 버전:
4.4 이상
업데이트 날짜:
2018년10월24일
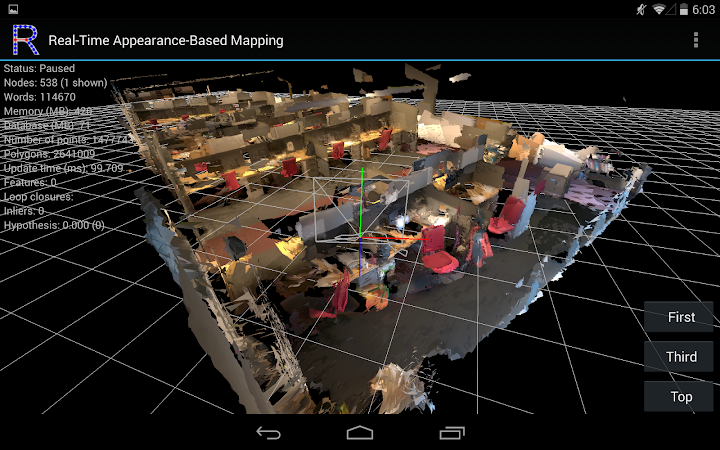
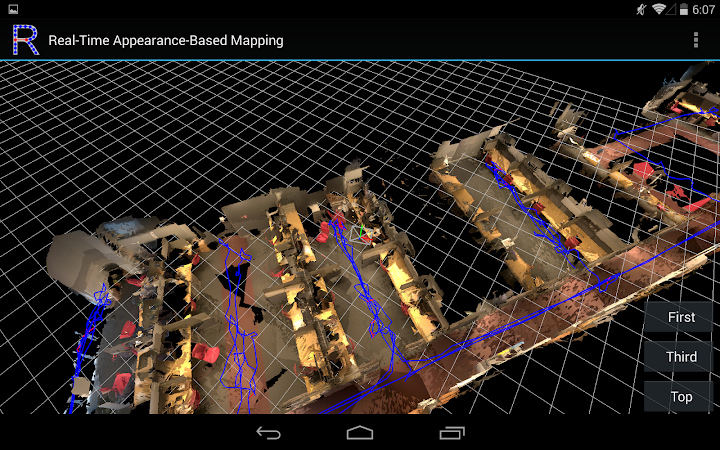
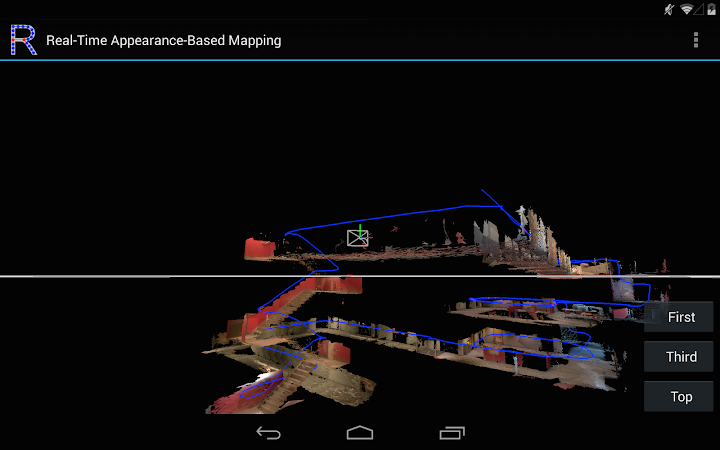
RTAB-Map (Real-Time Appearance-Based Mapping) is an Open Source RGB-D Graph-Based SLAM approach based on an incremental appearance-based loop closure detector. The loop closure detector uses a bag-of-words approach to determinate how likely a new image comes from a previous location or a new location.
댓글